Index / Past / №08 / High-Power Rocketry
AX-1.1 DEMONstrator
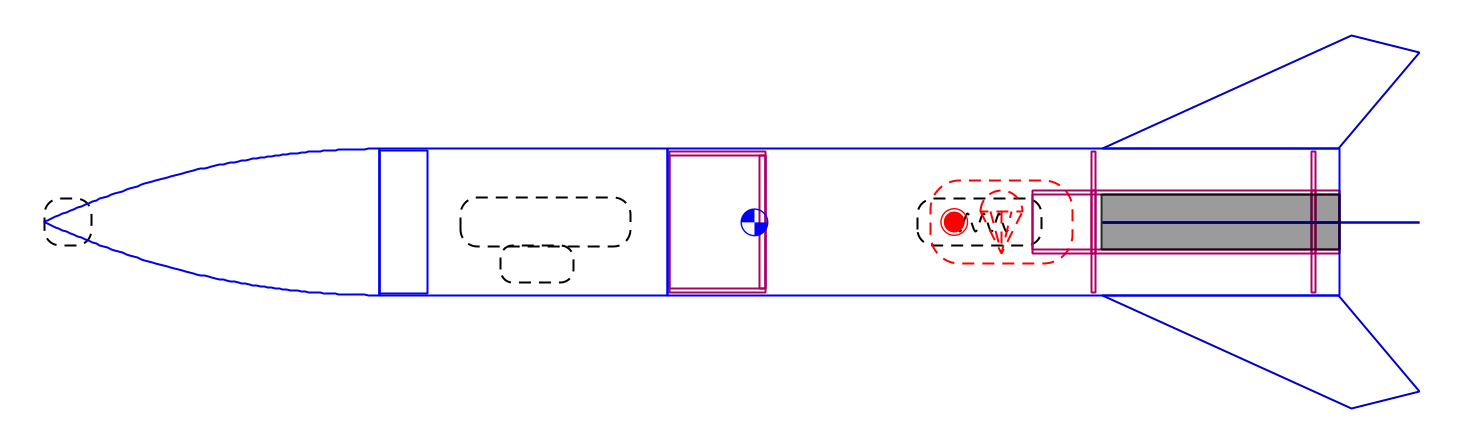
AX-1.1 is a fully 3D-printed modular rocket platform — a proof of concept for printed airframes and threaded, reusable interfaces aimed at parallel Level 1/2 missions. The body tube prints in carbon-fiber-reinforced PETG with honeycomb infill; the motor mount in PPA-CF, where motor heating dominates. Designed in Fusion 360 with every interface — motor mount, centering rings, nosecone ballast — engineered to thread together and come apart again, instead of being glued shut.
Body TubePETG-CF
Motor MountPPA-CF
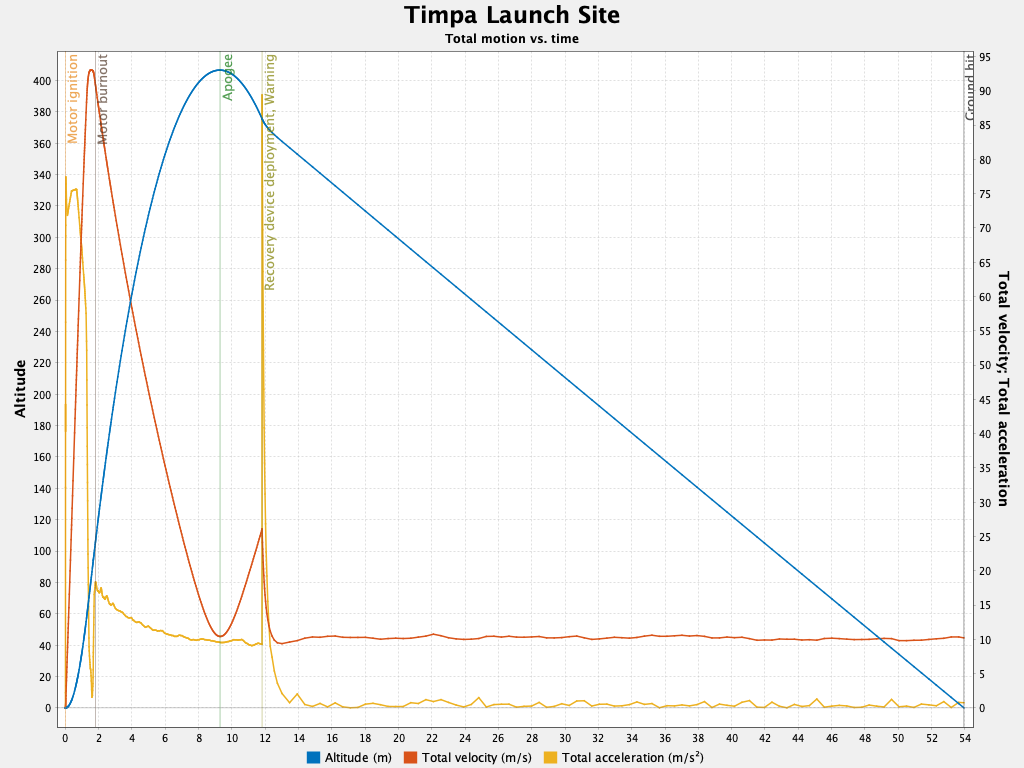
Payload Descent2.8 m/s
TelemetryLoRa 433 MHz